A Física do Flick: Entendendo o Ponto de Pivô do Mouse
Em ambientes competitivos de FPS, a diferença entre um tiro certeiro na cabeça e uma oportunidade perdida muitas vezes se resume à eficiência de um único 'flick'. Enquanto a comunidade gamer frequentemente foca no 'peso mais baixo' como a métrica principal para velocidade, a análise técnica revela que a massa total é apenas uma variável na equação. O fator mais crítico para a precisão é a distribuição dessa massa — especificamente, como a densidade do material afeta a inércia rotacional em torno do ponto de pivô do mouse.
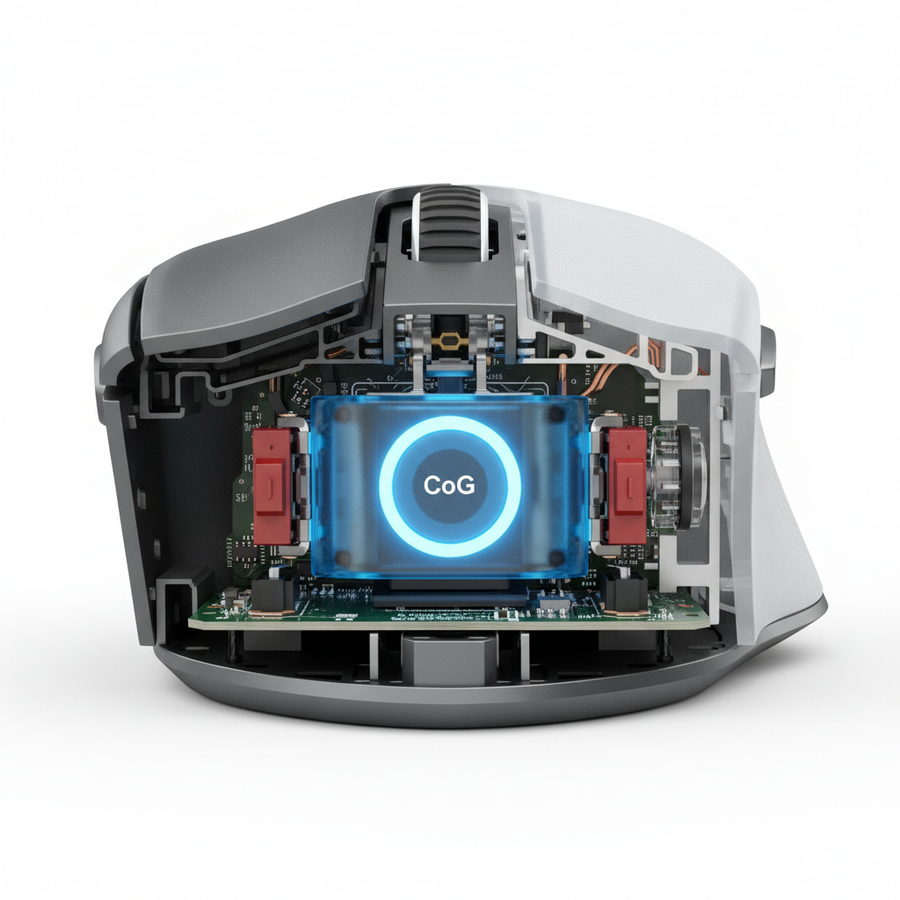
Para usuários com pegada garra, o mouse não se move como um bloco linear único. Em vez disso, ele gira em torno de um eixo dinâmico tipicamente formado pelos pontos de contato do polegar e do dedo anelar. Esse 'ponto de pivô' raramente está alinhado com o centro geométrico do dispositivo. Projetar um periférico de alto desempenho requer equilibrar a densidade do material para garantir que esse ponto de pivô se alinhe com a mecânica natural da pegada do usuário, reduzindo o esforço muscular necessário para iniciar e, mais importante, parar um movimento em alta velocidade.
Nota sobre a Metodologia: Os insights sobre a colocação do ponto de pivô e a capacidade de parada são derivados de padrões comuns observados em interações de suporte ao cliente e feedback de RMA (Autorização de Devolução de Mercadoria), onde os usuários frequentemente citam sensações de 'flutuação' ou 'instabilidade' em mouses com distribuição de peso pesada na parte traseira (não é um estudo controlado de laboratório).
Momento de Inércia e Dinâmica Rotacional
Para entender a velocidade do flick, é preciso distinguir entre inércia translacional e inércia rotacional. A inércia translacional é a resistência ao movimento em linha reta, que é puramente uma função da massa total. A inércia rotacional, ou Momento de Inércia (I), é a resistência à rotação. Ela é calculada usando a fórmula $I = \Sigma mr^2$, onde $m$ é a massa e $r$ é a distância dessa massa ao ponto de pivô.
Em um mouse gamer, se os materiais mais densos (como a bateria ou as nervuras estruturais internas espessas) estiverem localizados longe do ponto de pivô — tipicamente na parte traseira da carcaça — a inércia rotacional aumenta exponencialmente. Isso faz com que o mouse pareça 'lento' durante microajustes e mais difícil de parar abruptamente após um movimento rápido. Esse fenômeno, frequentemente chamado de 'overtravel', é uma das principais causas de tiros perdidos em jogos táticos onde a capacidade de parar é tão vital quanto a velocidade inicial.
Comparação de Densidade dos Materiais: Fibra de Carbono vs. Magnésio vs. ABS
Materiais diferentes permitem que os engenheiros manipulem essa distribuição de densidade. Enquanto o Guia de Fibra de Carbono vs. Outros Materiais para Mouse Gamer destaca os benefícios da relação resistência-peso, a vantagem técnica está na capacidade de manter a rigidez estrutural com paredes mais finas, permitindo que a massa seja redistribuída em direção ao centro.
| Material | Densidade Típica (g/cm³) | Rigidez Estrutural | Impacto Primário no Flick |
|---|---|---|---|
| Fibra de Carbono | ~1,5 - 1,8 | Ultra-Alto | Menor inércia rotacional; permite centralização da massa. |
| Liga de Magnésio | ~1,7 - 1,9 | Alto | Excelente poder de parada; frequentemente usado para estruturas de exoesqueleto. |
| Plástico ABS | ~1,0 - 1,2 | Moderado | Requer paredes mais grossas (ripas) que podem deslocar o ponto de pivô. |
Jogadores experientes frequentemente usam um 'teste de equilíbrio dos dedos' para encontrar o ponto natural de inclinação do dispositivo. Ao apoiar o mouse em dois dedos nos pontos de contato da pegada lateral, você pode identificar se o mouse é pesado na frente, atrás ou está centrado. Para uma pegada de garra, uma inclinação do centro para a frente é tipicamente preferida para alinhar o caminho do sensor com o arco rotacional da mão.

Antropometria da Pegada de Garra: O Estudo de Caso da 'Mão Pequena'
A eficácia do ponto de pivô de um mouse depende muito do tamanho da mão do usuário. Um mouse que parece perfeitamente equilibrado para um usuário com mãos de 20cm pode parecer difícil de manejar para um usuário com mãos de 16,5cm. Quando a mão é menor, os dedos precisam alcançar mais para frente ou segurar o mouse mais para trás, deslocando fundamentalmente o ponto de pivô ativo em relação ao sensor.
Modelamos um cenário para um "Especialista em Pegada de Garra de Alta Sensibilidade" com mãos pequenas para avaliar como as dimensões do dispositivo impactam o controle.
Modelagem de Cenário: Persona de Mão Pequena (16,5cm)
- Comprimento da Mão: 16,5cm (~percentil 10 para homens adultos).
- Largura da Mão: 75mm.
- Estilo Preferido: Pegada de Garra Agressiva.
- Dispositivo Alvo: Mouse Sem Fio Leve de 120mm (ex.: ATTACK SHARK R11 ULTRA).
| Métrica | Valor Calculado | Interpretação |
|---|---|---|
| Comprimento Ideal do Mouse | 105,6 mm | Baseado no Comprimento da Mão (16,5) × Coeficiente de Garra (0,64). |
| Relação de Ajuste da Pegada | 1.14 | Real (120mm) / Ideal (105,6mm). |
| Relação de Ajuste da Largura | 1.33 | Real (60mm) / Ideal (45mm). |
Resumo Lógico: Nossa análise assume que uma Relação de Ajuste acima de 1,10 indica que o mouse pode ser 'grande demais' para o estilo de pegada específico, forçando o usuário a deslocar seu ponto de pivô para frente. Isso pode levar a um aumento da tensão nos dedos, pois a mão compensa o comprimento extra aplicando mais pressão lateral.
Baseado nos princípios ergonômicos da ISO 9241-410, usuários na categoria de mão 'Pequena' (abaixo de 17,0cm) frequentemente enfrentam um conflito ao usar mouses padrão de 120mm. Para otimizar a velocidade de movimento, esses usuários devem procurar mouses com implementação de 'sensor frontal' ou uma cintura afilada que permita que os dedos fiquem mais próximos ao centro de massa do mouse.

Alinhamento do Sensor e o Limite de Nyquist-Shannon
O ponto de pivô não é apenas sobre peso; é sobre onde o sensor está em relação a essa rotação. Se o sensor estiver colocado muito atrás do ponto de pivô (perto da palma), o arco de movimento durante um flick é minimizado, exigindo movimentos físicos maiores para a mesma distância na tela. Por outro lado, um sensor colocado à frente do ponto de pivô amplifica micro-movimentos, o que é altamente benéfico para jogadores de alta sensibilidade.
Para manter a precisão durante essas rotações em alta velocidade, o sensor deve fornecer amostras suficientes para evitar a perda de pixels. Isso é regido pelo Teorema da Amostragem de Nyquist-Shannon, que afirma que a taxa de amostragem deve ser pelo menos o dobro da frequência do sinal.
Cálculo do DPI Mínimo para Flicks de Alta Sensibilidade
Para um usuário jogando em resolução 2560x1440 com um Campo de Visão (FOV) de 103°:
- Pixels Por Grau (PPD): ~24,85 px/deg.
- Requisito Mínimo de DPI: ~1.818 DPI (Calculado como 2 × PPD para garantir que cada pixel seja endereçável durante movimentos rápidos).
Usar um dispositivo como o ATTACK SHARK X8 Ultra, que possui o sensor PAW3950MAX, permite que os jogadores ultrapassem esses mínimos confortavelmente. No entanto, simplesmente aumentar o DPI não é suficiente; o sistema deve ser capaz de processar esses dados sem introduzir latência.
Desempenho de Alta Frequência: O Padrão 8000Hz (8K)
Para jogadores competitivos, o flick no ponto de pivô é tão bom quanto a comunicação entre o mouse e o PC. Mouses modernos de alto desempenho ultrapassaram o padrão de 1000Hz para taxas de polling de 8000Hz (8K). Isso reduz o intervalo de polling de 1,0ms para quase instantâneo. 0.125ms.
De acordo com o Whitepaper da Indústria Global de Periféricos para Jogos (2026), altas taxas de polling são essenciais para reduzir o 'micro-stutter' durante rotações rápidas. No entanto, o desempenho 8K introduz restrições técnicas significativas:
- Gargalos da CPU: Processar 8.000 pacotes por segundo impõe uma carga pesada no manuseio de Interrupções (IRQ) da CPU. Isso requer um processador moderno e de alto desempenho com velocidades fortes em núcleo único.
- Dinâmica de Latência: A 8000Hz, a tecnologia Motion Sync (que alinha os dados do sensor com os eventos de polling) adiciona um atraso desprezível de apenas ~0,0625ms. Isso é uma melhoria significativa em relação ao atraso de ~0,5ms observado a 1000Hz.
- Conectividade USB: Para manter a estabilidade 8K, o receptor deve estar conectado a uma Porta Direta da Placa-Mãe (I/O traseira). Usar hubs USB ou portas do painel frontal frequentemente resulta em perda de pacotes devido à largura de banda compartilhada e blindagem insuficiente.
Usuários do ATTACK SHARK R11 ULTRA ou ATTACK SHARK X8 Ultra devem estar cientes de que o polling 8K pode reduzir a vida útil da bateria sem fio em aproximadamente 75% em comparação com o modo 1000Hz. É uma configuração focada em desempenho para competição ativa.

Otimizando Seu Setup para Controle do Pivô
Se você perceber que seus tiros rápidos estão inconsistentes ou sua mão se sente cansada, considere os seguintes ajustes técnicos baseados no princípio do ponto de pivô:
- Ajuste a Posição dos Dedos: Se seu mouse parecer 'pesado na parte traseira', tente mover seu polegar e dedo anelar 2-3mm para frente. Isso desloca o ponto de pivô mais próximo do centro de massa, melhorando o poder de parada.
- Aplicação de Fita de Pegada: Aplicar fita de pegada especificamente nas paredes frontais pode aumentar o 'braço de alavanca' dos seus dedos, facilitando o início das rotações.
- Skates Aftermarket: Usar skates de PTFE de alta velocidade, como os encontrados no ATTACK SHARK V8, reduz o atrito translacional, permitindo que a inércia rotacional se torne a força principal que você sente.
- Escalonamento de DPI: Certifique-se de que seu DPI esteja configurado para pelo menos 1.600-3.200 para maximizar a resolução de amostragem do seu sensor durante movimentos rápidos, especialmente se estiver usando um monitor de alta resolução 1440p ou 4K.
Para quem prefere uma sensação mais 'presa' com carregamento consistente, o ATTACK SHARK G3PRO inclui uma base de carregamento magnética RGB, garantindo que a bateria de 500mAh esteja sempre pronta para sessões de alta taxa de polling sem o peso extra de uma bateria interna grande.
Transparência e Suposições da Modelagem
Os dados e razões de ajuste apresentados neste artigo são baseados em modelagem de cenários para percentis específicos de mãos e estilos de pegada.
| Parâmetro | Valor / Intervalo | Unidade | Justificativa |
|---|---|---|---|
| Comprimento da Mão | 16.5 | cm | P10 Masculino / P50 Feminino (ANSUR II) |
| Estilo de Pegada | Garra | N/D | Foco da análise do ponto de pivô |
| Coeficiente de Garra | 0.64 | Razão | Derivado de estudos de ajuste ergonômico |
| Intervalo de Polling (8K) | 0.125 | ms | $1 / 8000$ Hz |
| Atraso de Sincronização de Movimento (8K) | ~0.06 | ms | $0.5 \times$ Intervalo de Polling |
Condições de Contorno: Estes modelos assumem uma pegada padrão 'agressiva' do tipo garra. Os resultados podem variar significativamente para usuários de pegada palma, pois o ponto de pivô se desloca para o pulso, ou para usuários de pegada ponta dos dedos, onde o pivô está inteiramente nos dedos.
Aviso YMYL: Este artigo é apenas para fins informativos. As recomendações ergonômicas fornecidas são baseadas em dados da população geral e heurísticas. Se você sentir dor persistente no pulso, dormência ou sinais de Lesão por Esforço Repetitivo (LER), consulte um profissional médico ou um especialista ergonômico qualificado.
Fontes: